[menuju akhir]
1. Tujuan[kembali]
Membuka pintu garasi secara otomatis ketika kendaraan telah mendekati pintu garasi dalam jarak tertentu, serta menampilkan hasil pembacaan jarak yang terukur dalam Centimeter (Cm).
2. Alat dan Bahan[kembali]
- Arduino Uno
- Sensor Ultrasonic HC-SR04
- Motor Servo Sg90
- LCD
- Potensiometer 10k
- Jumper
- Akrilik
- Isolasi
- Lem akrilik
- Karton duplex
- Bread board
3. Teori[kembali]
3.1 Arduino Uno
Arduino Uno adalah board mikrokontroler berbasis ATmega328 (datasheet).
Memiliki 14 pin input dari output digital dimana 6 pin input tersebut
dapat digunakan sebagai output PWM dan 6 pin input analog, 16 MHz
osilator kristal, koneksi USB, jack power, ICSP header, dan tombol
reset. Untuk mendukung mikrokontroler agar dapat digunakan, cukup hanya
menghubungkan Board Arduino Uno ke komputer dengan menggunakan kabel USB
atau listrik dengan AC yang-ke adaptor-DC atau baterai untuk
menjalankannya.

3.2 Sensor Ultrasonik HC SR04
Sensor ultrasonik adalah sebuah sensor yang memiliki fungsi untuk
mengubah besaran fisis alias bunyi menjadi besaran listrik, begitupun
sebaliknya. Prinsip kerja sensor ultrasonik ini cukup simpel, yakni
berdasarkan pantulan suatu gelombang suara sehingga dapat digunakan
untuk mendefiniskan eksistensi atau jarak suatu benda dengan frekuensi
tertentu.

3.3 Motor Servo
Motor servo adalah sebuah motor DC dengan sistem umpan
balik tertutup di mana posisi rotor-nya akan diinformasikan kembali ke
rangkaian kontrol yang ada di dalam motor servo.
Motor ini terdiri dari sebuah motor DC, serangkaian gear,
potensiometer, dan rangkaian kontrol. Potensiometer berfungsi untuk
menentukan batas sudut dari putaran servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor servo.

LCD (Liquid Cristal
Display) adalah salah satu jenis display elektronik yang dibuat dengan
teknologi CMOS logic yang bekerja dengan tidak menghasilkan cahaya
tetapi memantulkan cahaya yang ada di sekelilingnya terhadap front-lit
atau mentransmisikan cahaya dari back-lit.
Read more at: http://elektronika-dasar.web.id/lcd-liquid-cristal-display/
Copyright © Elektronika Dasar
Read more at: http://elektronika-dasar.web.id/lcd-liquid-cristal-display/
Copyright © Elektronika Dasar
3.4 Liquid Crystal Display (LCD)
Liquid Crystal Display (LCD) adalah sebuah peralatan elektronik yang berfungsi untuk menampilkan output sebuah sistem dengan cara membentuk suatu citra atau gambaran pada sebuah layar. Secara garis besar komponen penyusun LCD terdiri dari kristal cair (liquid crystal) yang diapit oleh 2 buah elektroda transparan dan 2 buah filter polarisasi (polarizing filter).
LCD (Liquid Cristal
Display) adalah salah satu jenis display elektronik yang dibuat dengan
teknologi CMOS logic yang bekerja dengan tidak menghasilkan cahaya
tetapi memantulkan cahaya yang ada di sekelilingnya terhadap front-lit
atau mentransmisikan cahaya dari back-lit.
Read more at: http://elektronika-dasar.web.id/lcd-liquid-cristal-display/
Copyright © Elektronika Dasar
Read more at: http://elektronika-dasar.web.id/lcd-liquid-cristal-display/
Copyright © Elektronika Dasar

Sebuah
citra dibentuk dengan mengombinasikan kondisi nyala dan mati dari pixel-pixel yang
menyusun layar sebuah LCD. Pada umumnya LCD yang dijual di pasaran sudah
memiliki integrated circuit tersendiri sehingga para pemakai dapat mengontrol
tampilan LCD dengan mudah dengan menggunakan mikrokontroler untuk mengirimkan
data melalui pin-pin input yang sudah tersedia.
3.5 Potensiometer

Potensiometer (POT) adalah salah satu jenis Resistor yang Nilai Resistansinya dapat diatur sesuai dengan kebutuhan Rangkaian Elektronika ataupun kebutuhan pemakainya. Potensiometer merupakan Keluarga Resistor yang tergolong dalam Kategori Variable Resistor. Secara struktur, Potensiometer terdiri dari 3 kaki Terminal dengan sebuah shaft atau tuas yang berfungsi sebagai pengaturnya.
3.6 Jumper
Jumper pada sebuah komputer sebenarnya adalah connector (penghubung) sirkuit elektrik yand digunakan untuk menghubungkan atau memutus hubungan pada suatu sirkuit.

4. Listing Program [kembali]
#include <LiquidCrystal.h> //ini merupakan library untuk LCD#include <Servo.h> //library untuk motor servo
#define echoPin 9//pin 9 untuk echo
#define trigPin 10//pin 10 untuk trigger
long ping;
LiquidCrystal lcd(12, 11, 7, 6, 5, 4); //inisialisasi pin untuk LCD
Servo myservo;
int pos = 0; //menetapkan nilai pos sebesar 0 derajat
void setup() {
// put your setup code here, to run once:
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
lcd.begin(16,2);
lcd.setCursor(0,0);
lcd.print("Garasi"); // menampilkan tulisan garasi
delay(1000);
lcd.clear();
lcd.print("Otomatis");// menampilkan tulisan otomatis
delay(1000);
lcd.clear(); // menghapus LCD
lcd.print("Kelompok26"); // menampilkan tulisan kelompok26
delay(1000);
lcd.clear();
myservo.attach(3); //menetapkan pin 3 sebagai pin sinyal untuk motor servo
myservo.write(pos);//mengatur posisi awal motor servo ke posisi pos atau sudut 0 derajat
delay(15);
Serial.begin(9600);
}
void loop() {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
long duration = pulseIn(echoPin, HIGH); // menghitung berapa jarak yang terbaca
ping = duration/29/2;
lcd.setCursor(0,0);
lcd.print("Ping = "); //menampilkan jarak yang terbaca
lcd.setCursor(7,0);
lcd.print(ping);
delay(500);
lcd.clear();
Serial.println(ping);
if (ping <= 7)
{
myservo.write(90); // servo akan bergerak menuju sudut 90 derajat ketika jarak yang dibaca kecil sama dari 7 cm
delay(10);
}
else
{
myservo.write(pos); // servo akan bergerak ke posisi awal (0 derajat) ketika jarak yang dibaca besar dari 7 cm
delay( 1000);
}
}
5. Rangkaian Simulasi[kembali]

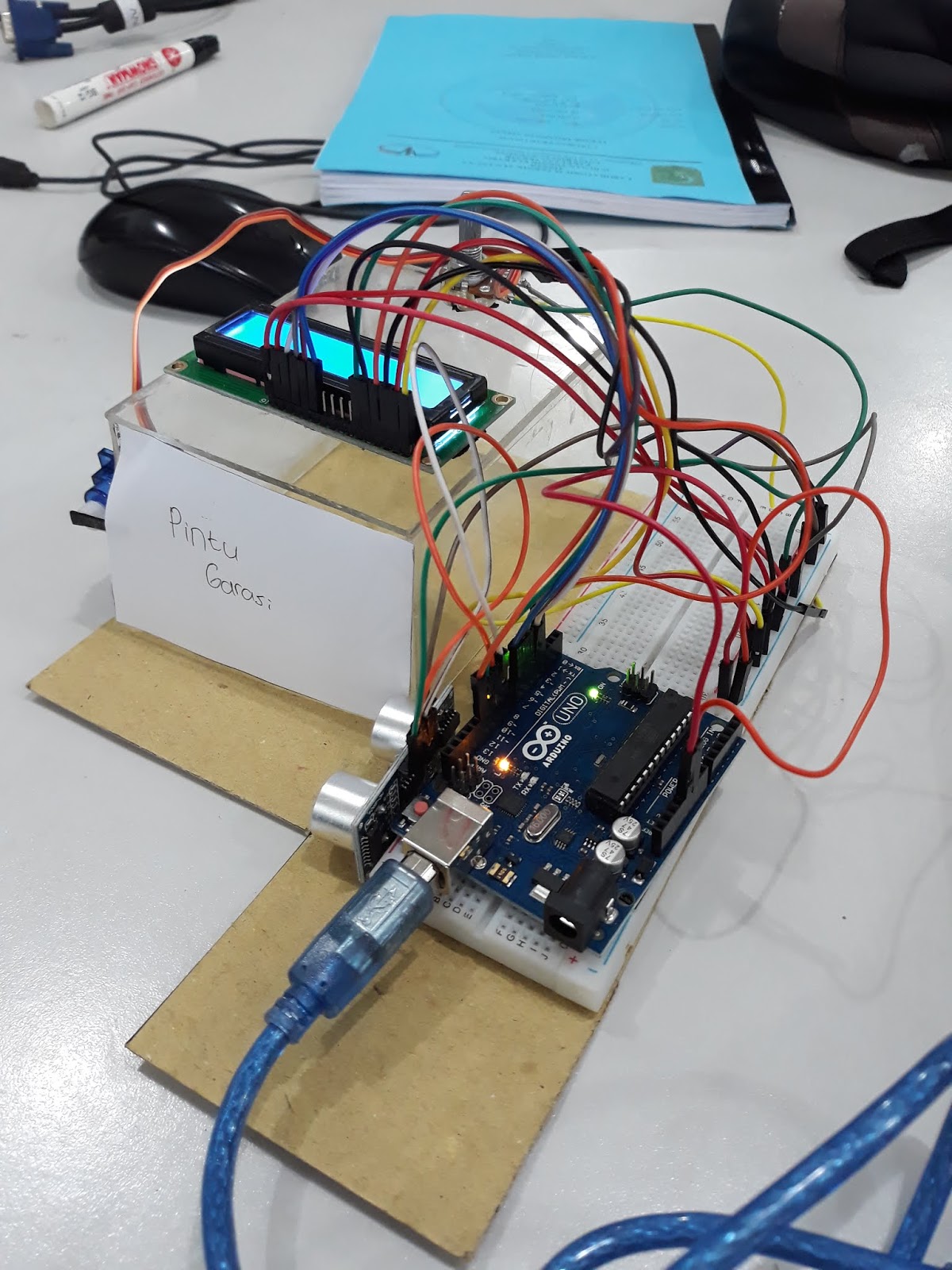
6. Foto Alat[kembali]
7. Video Simulasi[kembali]
8. Video Alat[kembali]
9. Program menggunakan Proteus Visual Designer[kembali]

10. Analisa (Prinsip Kerja Rangkaian)[kembali]
Pada alat yang telah dibuat, jarak dibaca oleh sensor ultrasonik dan ditampilkan oleh LCD. Ketika hasil pembacaan sensor ultrasonik kecil sama dari 7 cm, maka pintu garasi akan digerakkan oleh motor servo menuju sudut 90 derajat (pintu garasi terbuka). Dan ketika pembacaan besar dari 7 cm, maka pintu garasi akan kembali ke sudut semula, yakni 0 derajat (pintu garasi tertutup). Pengambilan nilai 7 cm berdasarkan bentuk prototype yang dibuat. Dikarenakan prototype berukuran kecil, maka jarak yang diambil cukup 7 cm. Untuk penerapan lebih lanjut, nilai ini dapat diubah sesuai kondisi yang didapatkan.
Tidak ada komentar:
Posting Komentar